Smart Calibration Test
Tests the robot calibration by placing the calibration part at any position and having it recognised by the camera system. The deviation between the deposit position and the recognised position should be as small as possible.
-
Recognising the calibration part on the platform
-
Output of the coordinates
Functional principle
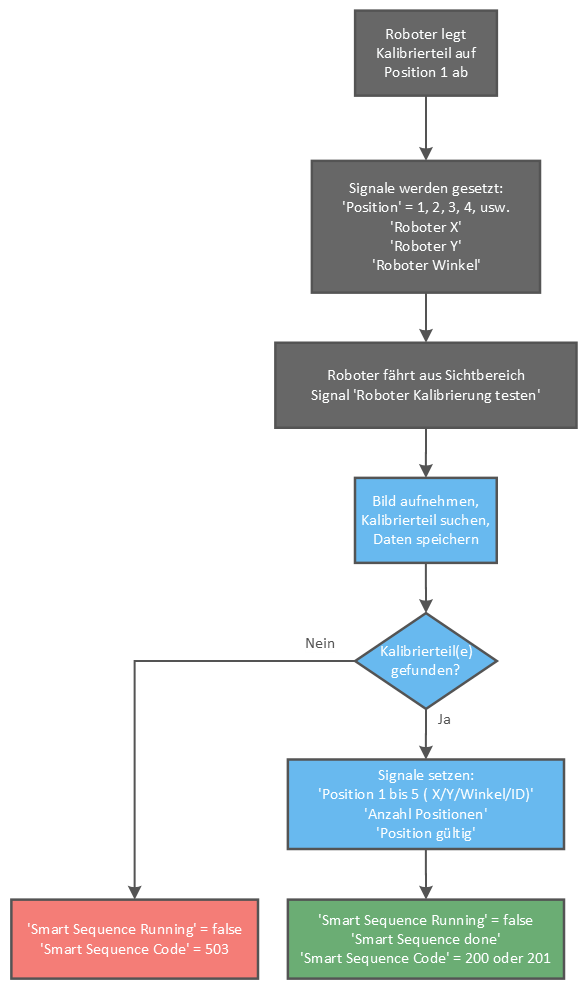
This sequence consists of several steps:
-
Robot places the calibration part in the desired position
-
Calibration part is recognised with camera
-
Coordinates are output
Information: No comparison of the target/actual coordinates is carried out on the camera side.